手术机器人凭借着创伤小、失血量少和恢复周期短等优势,逐渐成为外科手术的优先选项。然而,手术机器人工作场景普遍存在工作空间狭窄,手术器械灵活度和刚度不兼具等难题,对手术机器人设计提出了较高的要求。
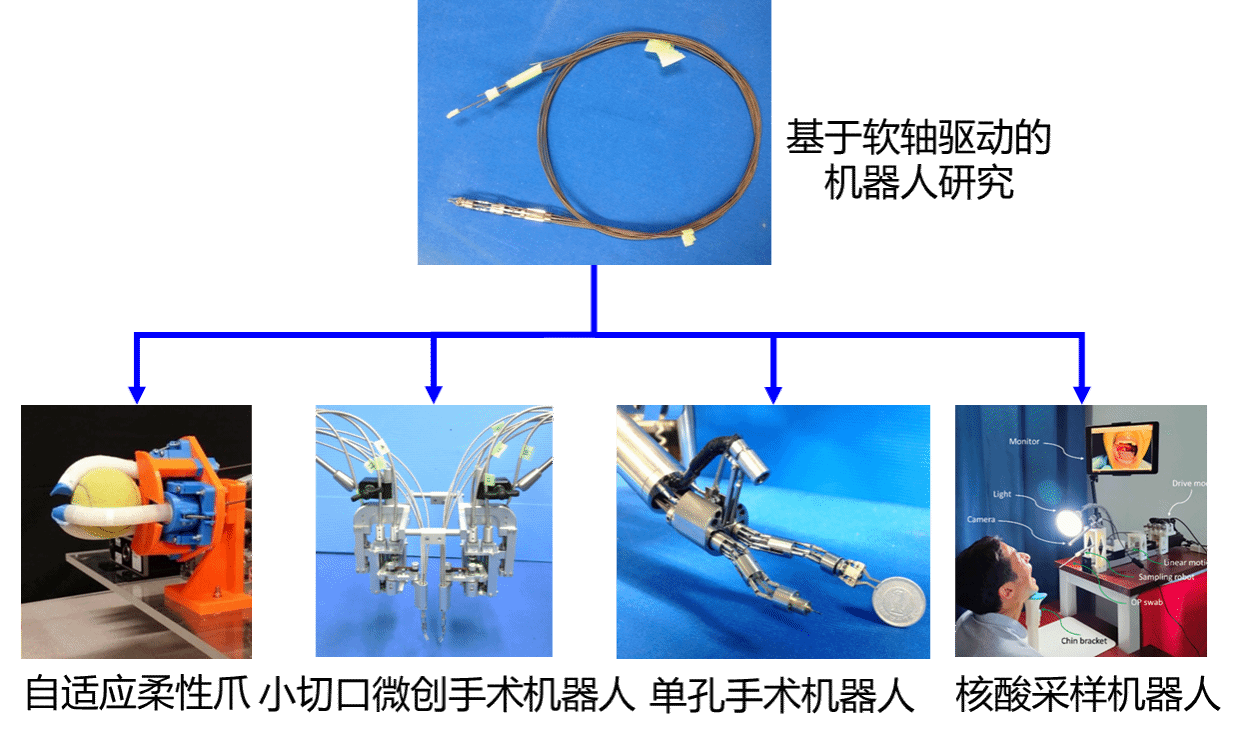
研发新型的动力传递方式实现小尺寸手术器械高灵活度操作是解决上述难题的有效手段之一。情感智能与普适计算研究中心团队研发了一系列基于软轴驱动的灵巧机构与手术机器人系统。软轴(Flexible Shaft)由多根亚毫米级钢丝相互缠绕而成,弯曲状态下仍然具备良好的轴向力和扭转力矩协同传递性能。在软轴上同时施加牵拉与扭转作用力,能够实现单根介质传动,双自由度输出的灵巧机器人构型,为非结构化环境中自适应柔性抓取提供解决方案。利用软轴在自由弯曲状态下优异的扭转力矩传递特性,建立了动力源单元与手术执行器空间可重构配置的组合方案,提升了手术机器人机构设计的灵活性。
基于上述研究成果,团队研发了单孔式手术机器人系统、婴幼儿先天性食道闭锁重建术手术机器人系统等样机与平台,并且在实验动物与受试者上测试验证,展示了软轴在高灵活度手术机器人研发中的巨大应用潜力。